



Servo control refers to the effective control of the position, speed and acceleration of certain object to meet a certain purpose. It is one of the most important control methods in modern industry.
Servo control system has been so widely used in industry, but do you know the basic knowledge about servo control? Check out this article to learn about how servo control system works and setting up tips.

Figure 1: An example diagram of a servo control cabinet in use.
1. Four Control Modes of Servo Motor
1.1 Torque Control Mode
Torque control is to set the external output torque of the motor shaft through the input of external analog quantity or direct address assignment. For example, if 10V corresponds to 5Nm, when the external analog quantity is set to 5V, the output is 2.5nm. If the load of the motor shaft is lower than 2.5nm, the motor is rotating. When the external load is equal to 2.5nm, the motor does not rotate, and when the load over 2.5nm, rotating direction reverses (usually under the condition of gravity load).
The torque can be changed by changing the setting of the analog quantity,or address value by means of communication. It is mainly used in winding and unwinding devices that have strict requirements on bearing capacity of material, such as wire spool device or optical fiber pulling equipment. The setting of torque should be changed at any time according to the change of the winding radius to ensure that the force material takes does not change.
1.2 Position Control Mode
In the position control mode, the rotation speed is generally determined by the frequency of the external input pulse, and the rotation Angle is determined by the number of pulses. In addition, some servos can assign the speed and displacement directly through communication.
The position mode is commonly applied to positioning devices because it allows for strict control of speed and position.
1.3 Speed Control Mode
The rotation speed can be controlled by the input of analog quantity or the frequency of pulse. The speed mode can also be positioned when there has outer loop PID of the upper control device to control, but the position signal of the motor or the direct load must be fed back to the upper for calculation.
1.4 Full Closed-Loop Control Mode
Full closed-loop control is a term compared with semi-closed loop control.
First of all, let's look at the semi-closed loop control.
The exponential control system or PLC sends out speed pulse instructions. The servo accepts instructions and then executes them. In the process of execution, the encoder of the servo itself gives the position feedback to the servo, and the servo itself corrects deviation. The deviation of the servo itself can be avoided, but the mechanical error cannot be avoided for the reason that the control system does not know actual position.
The full closed-loop refers to that the servo accepts the controllable-speed pulse instruction from the upper controller, and executes it. During the execution, the position-feedback device on the mechanical device directly feeds back to the control system. The control system detects the the actual deviation through comparison, and gives the servo instruction to correct deviation. Control system controls speed of the servo loop through frequency of pulse signal and then controls position of the servo loop through position sensor (grating ruler, encoder) to complete the position loop of the servo control. This formulation of control which combined servo motor, motion controller, and position sensor control called full closed-loop control.

Figure 2: Work principle of full closed-loop control mode.
2. Work Principle of PID Three-Term Controller
Servo motor is generally controlled by three loops. The so-called three-term controller is three closed-loops negative feedback PID regulation system. From inside to outside, the eletric current loop, speed loop and position loop are respectively.
Servo motor is generally controlled by three loops. The so-called three-term loops are three closed loops that are responsible for the feedback of PID control system. From the inside to the outside, it’s current loop, velocity loop and position loop.
2.1 Current Loop
The innermost PID loop is the current loop, which completely operates inside the servo drive. It detects the output current genarated by drive to each phase of the motor by The Hall device, and feedback negatively to the setting of the current to do PID adjustment, so that the output current can be as close as possible to the set current. The current loop is used to control the motor torque. Therefore, in the torque mode, the drive has minimum calculation and the fastest dynamic response.
2.2 Speed Loop
The negative-feedback PID adjustment is carried out by detecting the signal of motor encoder. Its output in the loop is the setting of the current loop, so the speed-loop control includes the speed loop and the current loop. In other words, any mode must use the current loop, and the current loop is the fundamental of the control. Actually system controls current (torque) to achieve contolling the speed and position.
2.3 Position Loop
it is the outermost loop, which can be built between the drive and the motor encoder, or between the external controller and the motor encoder or the final load, depending on the actual situation. Since the internal output of the position control loop is the setting of the speed loop, the calculation of all three loops is carried out in the position control mode.
At this point, the system has the largest amount of computation and the slowest dynamic response speed.

Figure 3: System concludes three loops-position loop, speed loop and current loop.
3. Gain-Adjustments of Three-Term Controller
3.1 Gain-Adjustments of Current Loop
The input of the current loop is the output of the speed loop after PID regulation, which we temporarily called the “current loop setting", and then the difference between the “current loop setting" of the current loop and the "current loop feedback" value is adjusted by the PID in the current loop and output to the motor.
The "current loop output" is the phase current of each phase of the motor. The "current loop feedback" is not the feedback of the encoder but is fed back to the current loop by the Hall element installed in each phase inside the drive (the magnetic field induction becomes the current voltage signal).
3.2 Gain-Adjustments of Speed Loop
the input of speed loop is the output after the position loop PID adjusting feedforward value and position setting, which we called "speed setting". After the difference of "speed setting" and "speed loop feedback" value finishes PID regulation in speed loop (mainly the proportion gain and integral processing), and the output is above said " current loop given".
3.3 Gain-Adjustments of Position Loop
In general, the input to the position loop is the result of the smoothing and filtering of the external pulse and the calculation of the electronic gear, except that the data is written directly to the drive address of the servo. This result is referred to as the "position loop setting".
the pulse signal You set and from the encoder feedback will be a value after the calculation of the deviation counter. After the value is adjusted by the PID of the position loop (proportional gain adjustment, no integration and differentiation), the encoder will output a sum value matching the given position, which will constitute the speed loop setting mentioned above.
The feedback of the position loop also comes from the code. The encoder is installed at the tail of the servo motor and has no connection with the current loop. It samples from the rotation of the motor rather than the current, and has no connection with the input, output and feedback of the current loop. The current loop is formed inside the drive. Even in the absence of a motor, only if has an analog load (such as a light bulb) on each phase, current loop can form a feedback.
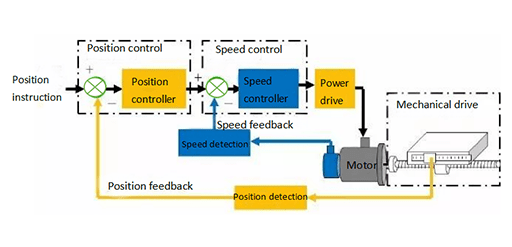
Figure 4: Work flow of three-term control
4. What is PID Control
PID is an important parameter in a servo control system, which refers to the control mode and the response mode between output and input. The letter P means “proportion", I means “integral" and D means “differential".
The PID control compares the collected data to a reference value, and then uses the difference to calculate a new input value to keep the system data up to or at the reference value.
Different from other simple control operations, PID control can adjust input value according to the historical data and the occurrence rate of differences, which can make the system more accurate and stable.
It is proved mathematically that a PID-feedback loop can keep the system stable when other control methods cause stability errors or process iterations. Simply put, PID control is feedback control which can measuring the variables and comparing them with the expected value, and then using these errors to correct and adjust the control system.
5. Influence of PID Difference Adjustment for System
5.1 Difference Adjustment for Proportion
The single P (Proportion) is the calculation of the difference into proportion, and its significant feature is the difference adjustment.
The “difference" means that after the adjusting process, the adjusted value cannot be exactly equal to the set value, and there must be residual. The specific residual value can be calculated through the proportional relationship.
Increasing the proportion will effectively reduce the residual error and increase the system response, but it is easy to cause the system to oscillate violently or even unstable.
5.2 Difference Adjustment for Integral
Separate I (Integral) is to make the controller output signal changes in the speed which is proportional to the difference signal. It is not hard to understand that if the difference is large, the speed of change in the integral process is fast. The proportional reciprocal of the proportional constant of this process, we usually call it the iintegral time constant. The smaller the constant is, the system changes faster. Therefore, if the integral speed is increased (that is, the integral time constant is decreased), the stability of the control system will be reduced until the divergent oscillation process occurs at last. The biggest benefit of this process is that there is no residual .
5.3 Difference Adjustment for Combination of Proportion and Integral
PI (Proportion and Integral) is the combination of the advantages of P and I. It uses P regulation to quickly offset the influence of interference and I regulation to eliminate residual error.
5.4 Difference Adjustment for Differential
D (Differential) alone just adjusts according to the direction and magnitude of the difference. The output value of the regulator is proportional to the derivative of the difference with respect to time.
The differential process can only play an auxiliary role in regulation, it can be combined with other regulation into PD and PID regulation. The advantage is that it can adjust according to the change rate of the regulated quantity (difference), rather than waiting for a large deviation before starting to act. In fact it gives the regulator a degree of predictability so as to increase the system's response characteristics to small variation.

Figure 5: What is PID control algorithm.
6. Principles of Gain Adjustment
Both Panasonic Servo Motors and Mitsubishi Servo Motors have the function of automatic gain adjustment, so no additional adjustments are needed. But there are also some servos that need to be manually adjusted. When you adjust servo motors manually, you should pay attention to the following points.
6.1 Gain Adjustments for Position Loop and Speed Loop
The position loop adjusts the static gain and the speed loop adjusts the dynamic gain. In a nutshell, the position loop is adjusted when the motor is stopped. When the motor is running you should adjust speed loop.
6.2 Gain Adjustment for Position Loop
It increases the speed of position response which means how fast to find the position. The higher the gain adjustment is, the shorter the time it takes to reach the target. In a closed-loop system, it is a process of high-speed oscillation at the end of the final positioning, which rapidly oscillates around the target value and finally finds the target. Higher the gain is, the end of the shock is faster, and this is one of important performance indicators of the servo motor.
6.3 Gain Adjustment for Speed Loop
It regards performance to reach the target speed. It seems that the higher the gain, the better, but the actual operation is not the case. The servo system gain is too high will bring resonance, produce huge noise, causing the motor violent vibration. It is recommended to set the gain as low as possible, and the motor will stop barking. Excessive gain can also cause problems such as overspeed, overload, overcurrent, etc.
