



Figure 1: Step motor 28BYJ 48 and ULN2003 driver board.
1. What is a Stepper Motor
Stepper motor, also known as step motor, stepping motor, converts received electric pulse signal into angular displacement or linear displacement. It is the main actuating element in modern digital program control systems and is widely used.
The stepper motor control system consists of three parts: the stepper motor controller, the stepper motor driver, and the stepper motor. The stepper motor controller is the command center, which sends out signal pulses to the stepper motor driver. The stepper motor driver converts the received signal pulses into electrical pulses to drive the stepper motor to rotate. Each time the controller sends out a signal pulse, the stepper motor rotates by an angle, which is called "step angle", and its rotation runs step by step at a fixed angle.
In the case of non-overload, the speed and stop position of the motor only depend on the frequency and number of the pulse signal, and are not affected by load changes. That is, the angular displacement can be controlled by controlling the number of pulses, so as to achieve the purpose of accurate positioning. At the same time, the speed and acceleration of the motor can be controlled by controlling the pulse frequency, so as to achieve the purpose of speed control.

Figure 2: Stepper motor control system.
2. How Does a Stepper Motor Work
Usually the rotor of the motor is a permanent magnet. When the current flows through the stator winding, which generates a vector magnetic field. When the vector magnetic field of the stator rotates an angle, the rotor also rotates an angle with it.
Each time an electrical pulse is input, the motor rotates an angle and moves forward one step. The angular displacement it outputs is proportional to the number of input pulses, and the rotational speed is proportional to the pulse frequency. How to invert stepper motor direction? Change the order in which the windings are energized and the motor direction will reverse. Therefore, the rotation of the stepper motor can be controlled by controlling the number of pulses, the frequency and the power-on sequence of each phase winding of the motor.
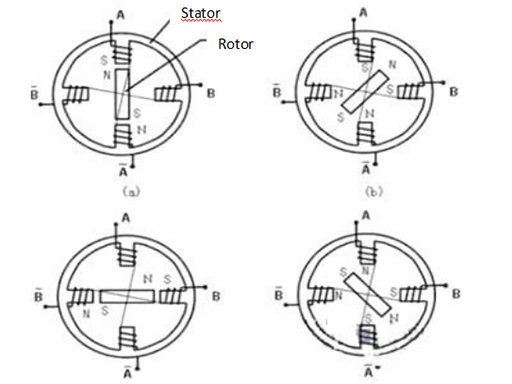
Figure 3: Working principle diagram of two-phase stepper motor.
The working principle can be analyzed from the above figure. There are two sets of windings A A- and B B- in the figure, and the magnetic fields formed by them are opposite and their positions are relative. The stator is an iron core, A A-, B B- are wound on the iron core. After energizing the magnetic field into an electromagnet, the rotor is a permanent magnet, so the magnetic field will attract or repel the rotor.
The upper left picture A A- attracts the rotor so that the rotor is vertical, and only A A- is energized at this time. When B B- is also energized, B B- also generates a magnetic field. At this time, the rotor will deflect to the middle area of A and B, and the specific deflection angle is related to the respective currents on A and B.
In the lower left picture, at this time, A A- is powered off, and B B- continues to be powered on, and the rotor is attracted to the horizontal position.
In the lower right picture, A A- is energized in reverse, B B- continues to energize, and the rotor rotates clockwise.
3. Operating Modes
There are three operating modes of stepper motor, namely full step, half step and micro step modes.
3.1 Full Step
For the full-step mode, the motor takes one full step after receiving one electrical pulse. For example, for a stepping motor with a stepping angle of 3.6°, the full step drive is 3.6°for each step. According to the number of energized phases, a full step drive is divided into single-phase and two-phase full-step drives, as shown in the figure below.

Figure 4: Single-phase and two-phase full step.
3.2 Half Step
Half-step mode is to drive only half a step at a time. For example, for a stepper motor with a step angle of 3.6°, half-step drive means that each step is 1.8° (3.6°/2). It is realized by alternately energizing one of the coils or both coils. When single-phase is energized, one coil produces a magnetic field, and the rotor points toward the energized coil, while when dual-phase is energized, both coils produce a magnetic field, and the combined magnetic field keeps the rotor in an intermediate position. You can see the picture below to understand it.

Figure 5: Half step mode.
3.3 Micro Step
Micro-step mode is actually not difficult to understand. As the size of the current changes, the strength of the coil magnetic field will also change, and the balance position of the rotor will also change, which is the principle of micro step mode.
At the beginning, A coil has the maximum current, the B coil current is 0, and the rotor points to the A coil. If the A coil current slowly decreases and the B coil current increases slowly, the rotor will slowly turn to the B coil. From a macro point of view, the current changes of the A and B coils are close to the curve of trigonometric function.
The size of the current change in each step determines that of the micro-step movement. The more steps, the smoother the movement, but the torque will be reduced accordingly.
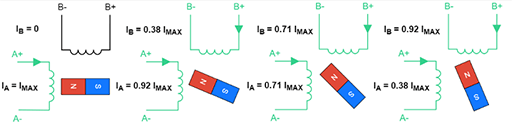
Figure 6: Micro step mode.
4. Advantages and Disadvantages of Stepper Motors
The position and speed signals of the stepping motor are not fed back to the control system. If these signals are fed back to the control system, then it is a servo motor. Compared with servo motors, the control of stepper motors is relatively simple, but it is not suitable for occasions with high precision requirements.
The detailed advantages and disadvantages are as follows.
4.1 Advantage
1. The motor operation is easy to control by inputting the pulse signal to the motor;
2. No feedback circuit is required to return the position and velocity information of the rotating shaft (open loop control);
3. Greater reliability due to no contact brushes.
4.2 Disadvantage
1. Pulse signal output circuit is required;
2. When the control is not appropriate, synchronization loss may occur;
3. Heat is generated due to the presence of current even after the rotating shaft has stopped.
The advantages and disadvantages of stepper motors are very prominent. The advantages are concentrated in simple control and high precision, while the disadvantages are in noise, vibration and efficiency.
It has no accumulated error, simple structure, convenient use and maintenance, and low manufacturing cost. The stepper motor has a large ability to drive the load inertia, and is suitable for small and medium-sized machine tools and places where the speed accuracy is not high. The disadvantage is the low efficiency, heating, sometimes "out of step".

Figure 7: Stepper motor 28BYJ-48.
5. What is a Stepper Motor Used for
The stepping motor is mainly used in some occasions with positioning requirements,
widely used in ATM machines, inkjet printers, cutting plotters, photo machines, spraying equipment, medical instruments and equipment, precision instruments, industrial control systems, office automation, robots and other fields. It is especially suitable for applications requiring smooth operation, low noise, fast response, long service life and high output torque.
Stepper motors are widely used in textile machinery and equipment such as computerized embroidery machines. These stepper motors are characterized by low holding torque, fast response time for frequent starting, low running noise, smooth operation, good control performance and low cost of the whole machine.
At present, most of the stepping motors used in computerized embroidery machines are five-phase hybrid stepping motors. The purpose is to reduce the step angle and improve the control accuracy by using a high-phase stepping motor. But the performance improvement obtained in this way is limited, and the cost is relatively high.
The use of micro step technology can greatly improve the running quality of stepper motors, reduce torque fluctuations and noise, suppress oscillations, and improve step torque resolution. If a reactive stepping motor is used, the performance can be significantly improved while also greatly reducing the cost of the product.
Related Info
AC Motor: Types, Speed Control, Features & UsesTop 10 Brands of Linear Motors
What is DC Motor and How Does It Work?
Types of DC Motors
Permanent Magnet DC Motor: Types, Application, Selection Principle (1)
