




Figure 1: A servo motor.
1. Rotational Inertia of Servo Motor
Servo motor refers to the motor that controls the operation of mechanical components in a servo system. Its rotor speed controlled by the input signal can respond quickly. In the automatic control system, the servo motor is the executive component and features a small electrical and mechanical time constant, high linearity, and starting voltage. It would convert the received electrical signal into the angular displacement or speed on the motor shaft.
Inertia =Radius of Rotation * Mass
The moment of inertia, also known as the rotational inertia, is a quantity that determines the inertia of a rigid body rotating around an axis. It has to do with the mass of the rigid body and its distribution relative to the axis of rotation. The moment of inertia is also an important indicator to choose the servo motor. It gives the inertia of the servo motor rotor, which is of vital importance for the acceleration and deceleration of the motor. The rotational inertia not well matched causes the motor to be uneven.
2. Differences between Lower and Higher Moments of Inertia
2.1 Lower Moments of Inertia
The motor is relatively flat, the spindle inertia moment is lower. When the motor rotates repeatedly with high frequency, the moment of inertia is lower, so the heat is less. So the motor with lower inertia is suitable for high-frequency reciprocating motion. But the general torque is relatively small.

Figure 2: Panasonic Servo Motor MSMF012L1U2M(low inertia).
2.2 Higher Moments of Inertia
The servo motor with higher inertia moment is relatively large, which is suitable for the occasions of large torque but not quick reciprocating motion. Because the drive has to generate a lot of reverse driving voltage to stop this large inertia, the heat is very high.

Figure 3: Panasonic Servo Motor MHMD042G1U(high inertia).
3. Knowledge of Inertia Matching
3.1 Inertia Matching Definitions
According to Newton's second law, "the torque T required by the feed system= the system transmission inertia J * angular accelerationθ". Angular accelerationθaffects the dynamic characteristics of the system.
The smaller θ is, the longer the time from the controller to the completion of the system execution will be, and the slower the system response will be. Ifθ changes, the speed of the system reaction will get unstable, affecting the machining accuracy. Since the maximum output T value remains unchanged after the motor is selected, J should be as small as possible if the change in θ is desired.
The total inertia of the feed shaft "J= the rotational inertia of the servo motor(JM) + the load moment of inertia converted by the motor shaft(JL)".
JL consists of the inertia moment of the worktable and its fixtures and workpieces, screws, couplings, and other linear and rotating moving parts converted to the inertia of the motor shaft. JM is the inertia moment of the rotor of the servo motor.
After the servo motor is selected, this value will be constant, while JL will change with the load change of the workpiece. If you want the rate of change of J to be small, you'd better make the ratio of JL small. This is known as "inertia matching" in the popular sense.
3.2 Inertia Matching Applications
In the selection of the servo system, in addition to considering the torque and rated speed of the motor and other factors, we also need to calculate the inertia moment converted from the mechanical system to the motor shaft. Then we need to select the motor with the appropriate inertia moment according to the actual operation requirements of the machine and the quality requirements of the workpiece.
In debugging, the correct setting of inertia moment ratio parameters is the precondition to giving full play to the best performance of the mechanical and servo system. This point is prominent in the system requiring high speed and high precision. So, there's the problem of inertia matching!
4. Influences of Rotational Inertia
The rotational inertia influences the servo system's accuracy, stability, dynamic response. The moment of inertia is large, the system of the mechanical constant is large. The system responses slowly. It’s easy to produce resonance, thus limits the servo bandwidth and affects the servo precision and response speed. An appropriate increase of the moment of inertia is favorable only when improving the low-speed crawling. Therefore, in mechanical design, the inertia moment should be reduced as far as possible without affecting the stiffness of the system.
5. Industrial Scenes for Different Moments of Inertia
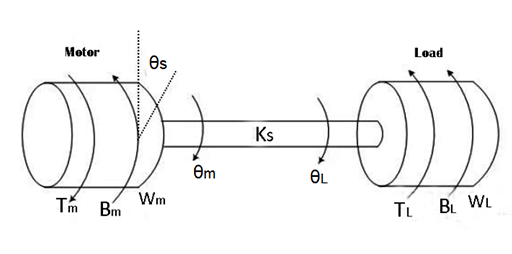
Figure 4: A Motor-Load transmission model with a rotational axis.
Generally speaking, the motor with small inertia has good braking performance, the reaction of starting, accelerating, and stopping is very fast. It is suitable for light load and high-speed positioning. The motor with medium or large inertia moment is suitable for occasions requiring large load and stability.
If the load is relatively large or the acceleration characteristic is relatively large, and the motor with low inertia is chosen, it may cause too much damage to the motor shaft. The selection should be based on the size of the load, the size of the acceleration, and other factors.
The maximum ratio of the load inertia and the motor rotor inertia should not exceed five. Through the design of mechanical transmission devices, the ratio could be close to one or smaller. When the load inertia is really high and the mechanical design is impossible to make the ratio less than five, the motor with high rotor inertia would be used. If using a high inertia motor, the capacity of the drive should be larger to achieve a certain response.
